研究・開発





- トップページ
- 研究・開発
研究・開発
GETA LABO3つの柱
様々な下駄で足元から整える短時間プログラム
平安時代から日本人の足元を支えてきた一本歯下駄を皮切りに、成長期のお子さん、マタニティー、高齢者の方まで使える足半一本歯下駄や、アスリート仕様の縦歯下駄、ウォーキングやランナーまで使える二本歯下駄を使って人々の健康をサポートいたします。
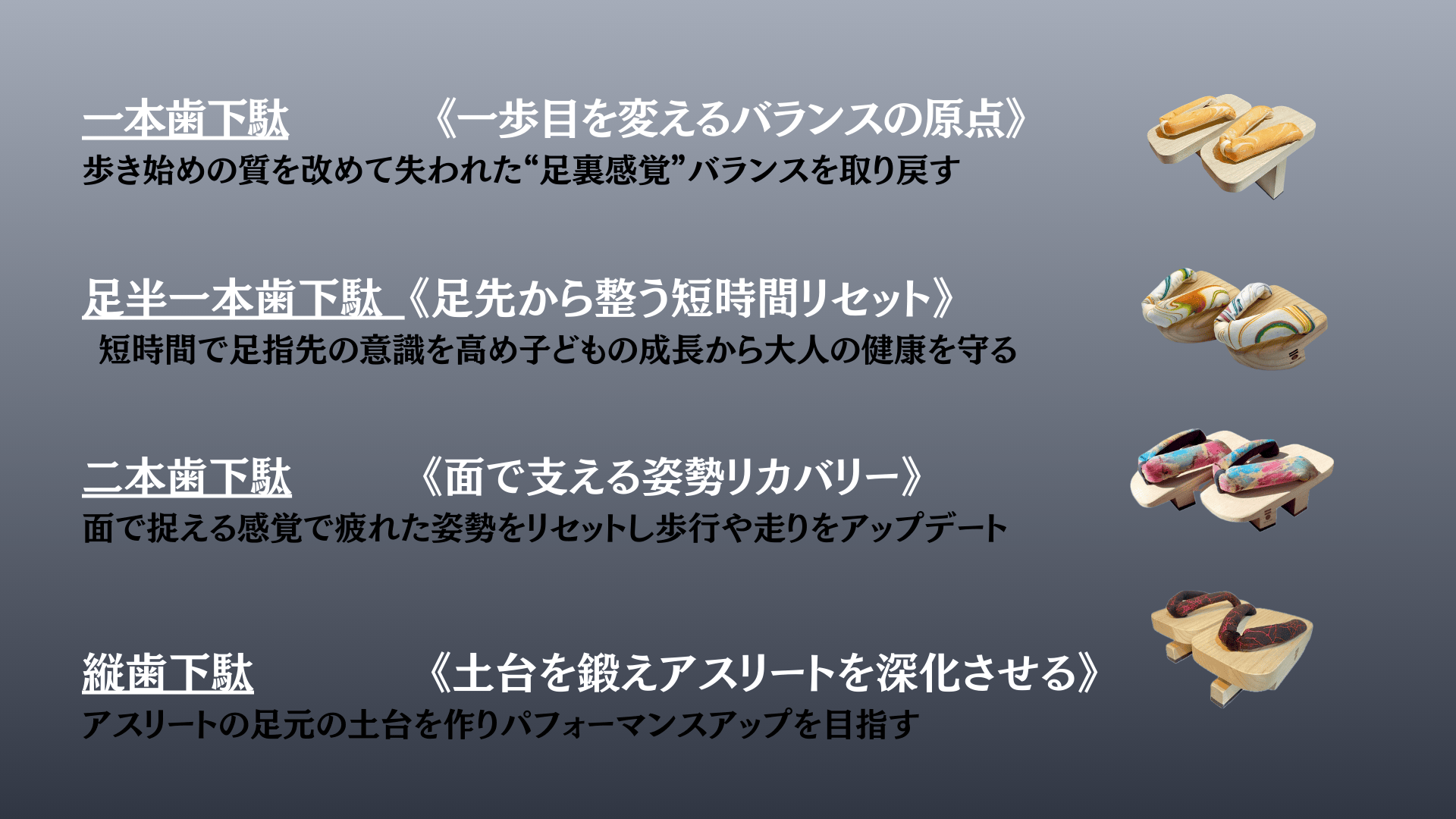
[一本歯下駄] [足半一本歯下駄] [二本歯下駄] [縦歯下駄]
足裏を正しく使って歩けていますか?
足裏の筋肉は足首やふくらはぎ、太ももなどと密接に関わり正しい歩行には欠かせません。
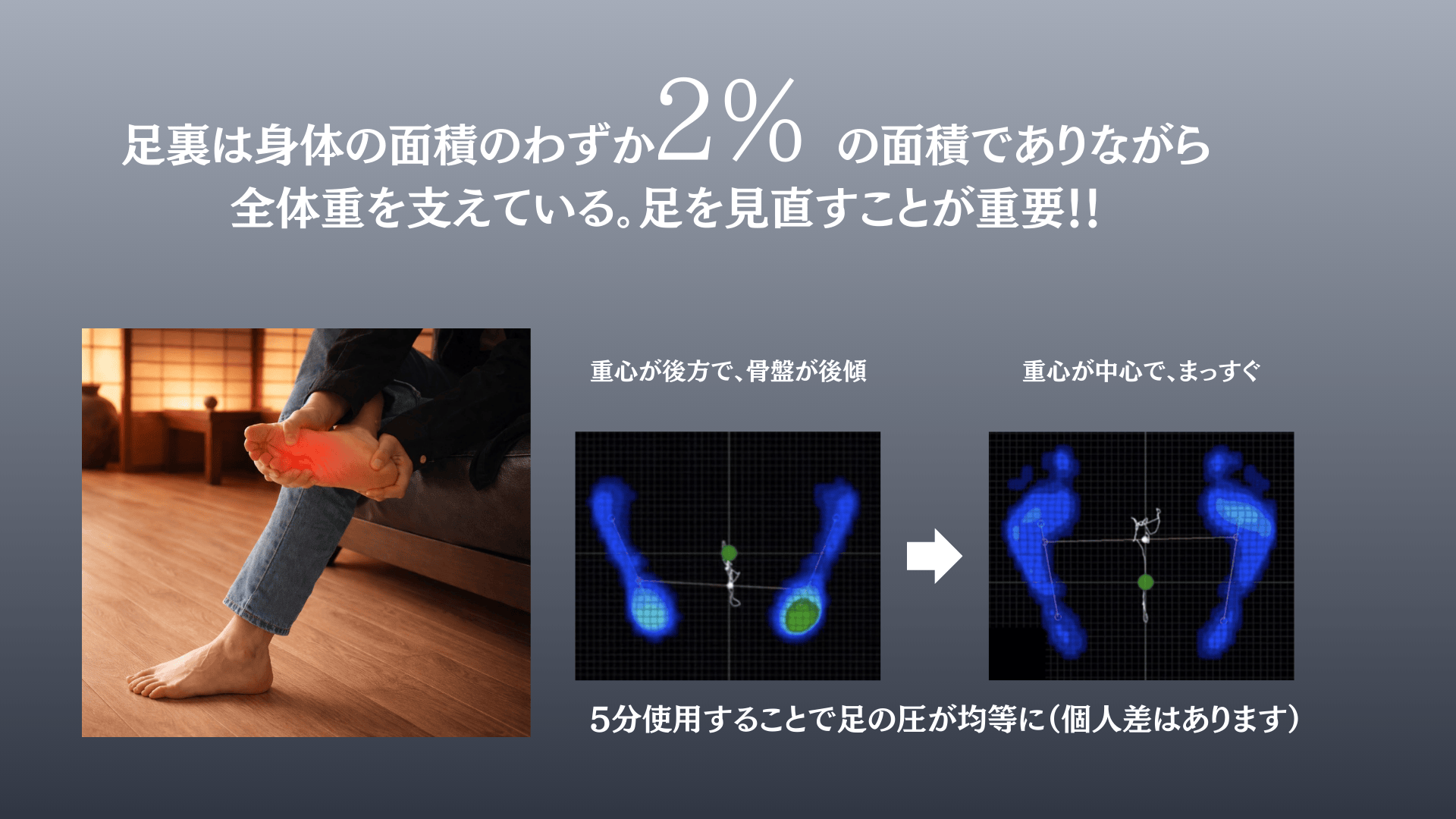
足裏は身体の面積のわずか2%の面積でありながら全体重を支えバランスを保つ重要な役割を担ってますが、現代人の多くは足裏を十分に活用できておらず聴きなれない言葉かもしれませんが『浮き指』と呼ばれる問題が見られます。
これは歩行の際に足指が地面にしっかり接触せず踏ん張れない状態のことです。
浮き指の原因の一つに幼児期の生活習慣があり、特に3歳〜6歳の頃には十分に歩かなかったり靴が合わないことで問題が生じやすくなります。
浮き指になっていることで足裏で体重を均等に支えることができず、ふくらはぎや太ももなどに負担がかかってしまいます。
その結果、現代人の生活は頭が重心より前になった姿勢で作業をすることが増えて猫背や腰痛を引き起こし疲れがたまりやすくなっており身体が前に傾くことを防ぐ運動が重要だと考えています。また足裏の筋肉が弱いと転倒のリスクも高まりますので正しい足裏の使い方を日常的にサポートできるように『感覚とエビデンスの融合』をさせた下駄を開発してます。
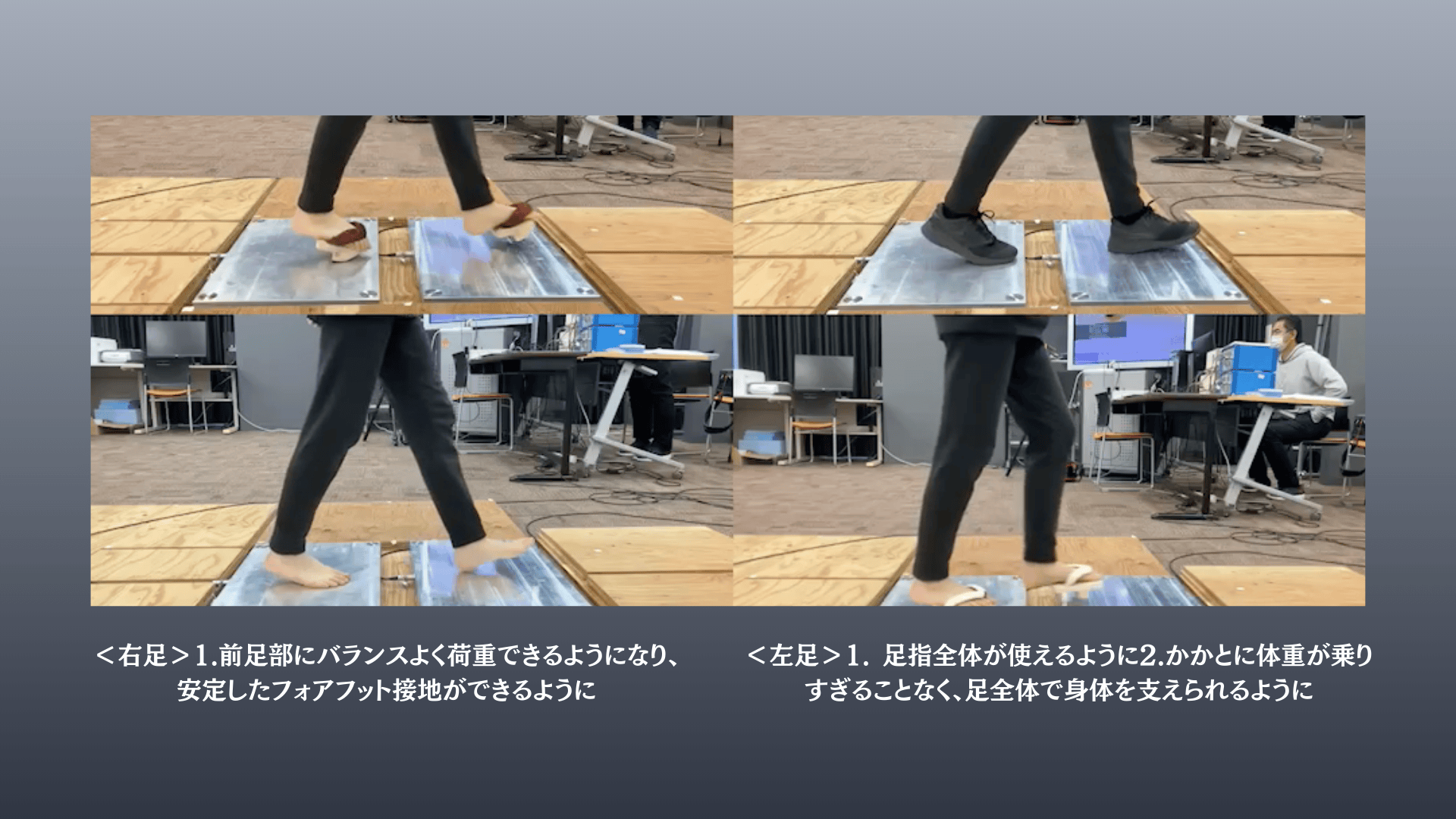
履き物の違いによって歩行バランスの変化を計測しました。
トライポッドフット
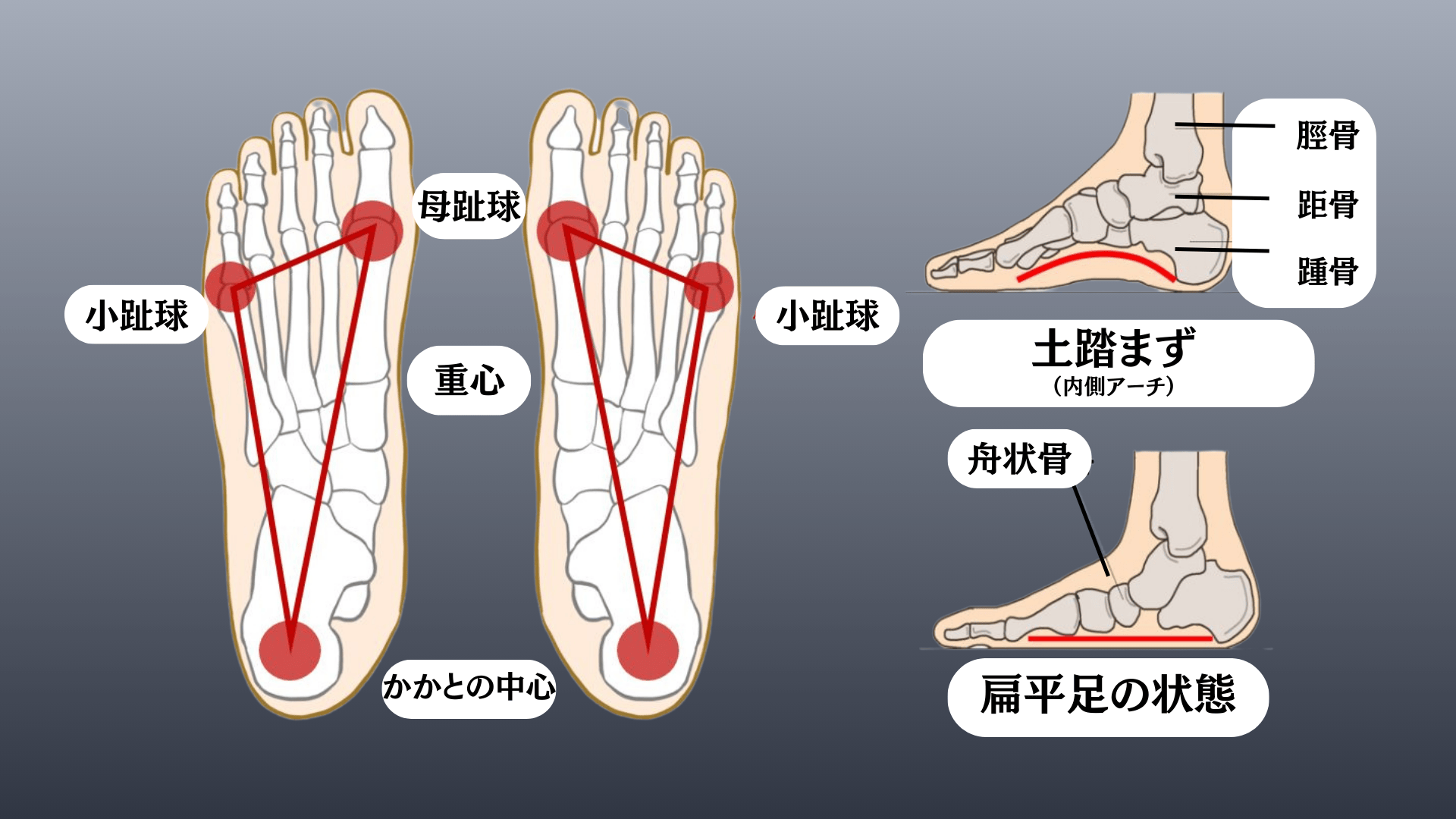
トライポッドフット(Tripod Foot)とは、足裏が3点で身体を支える構造・考え方を示す言葉です。
■3つの支点(トライポッド)足底には、体重を支える3つの重要なポイントがあります。
1.母趾球(第1中足骨頭) 2.小趾球(第5中足骨頭) 3.かかと(踵骨)
この3点で地面に安定して接地することで、足のアーチが適切に働く・荷重が均等に分散される・姿勢・歩行やスポーツの動作の安定性が高まるといったメリットがあります。
GETA LABO×トライポッドフット
かかとをつけるだけでトライポッドフットをつくる
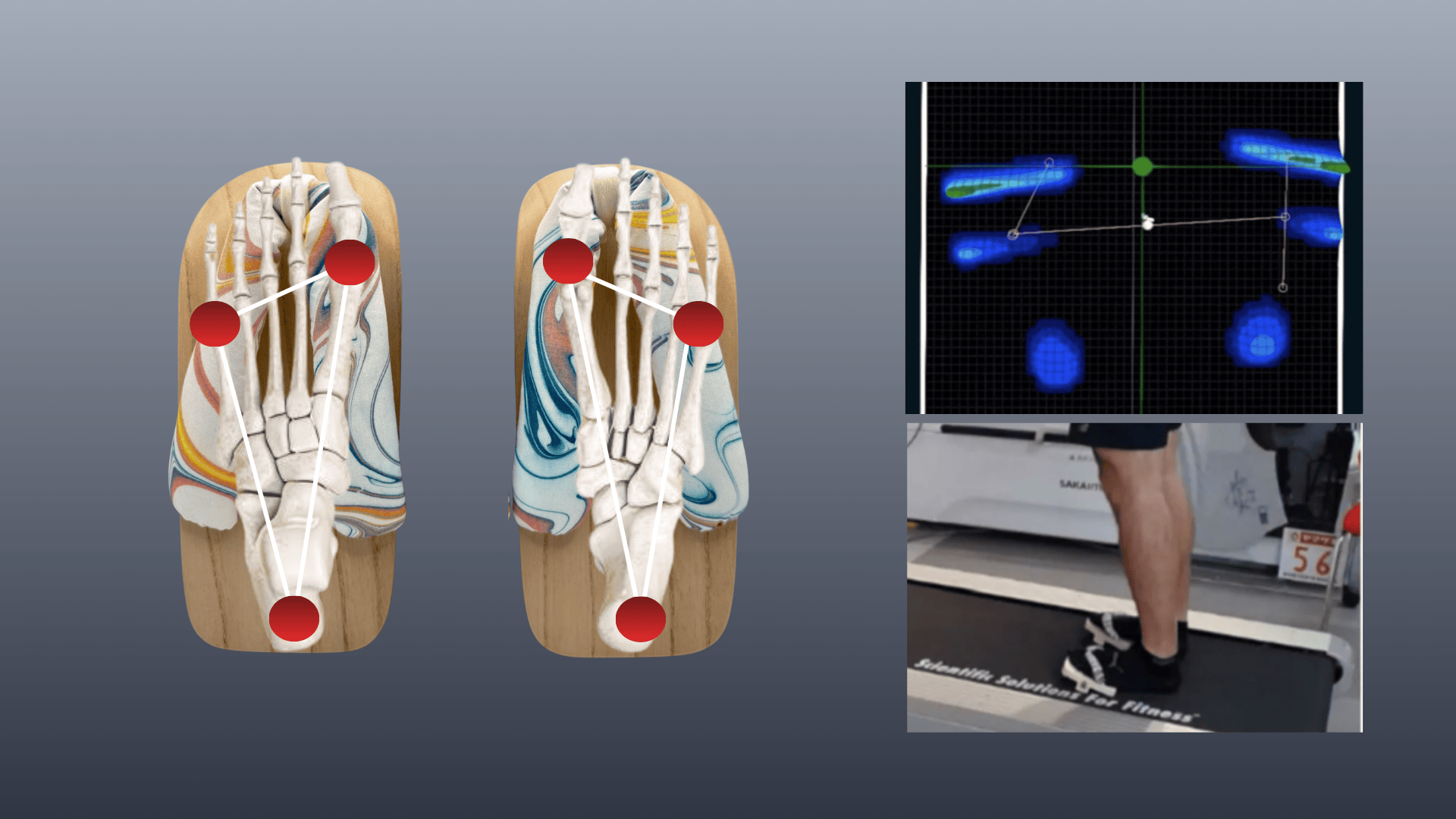
下駄の形状はトライポッドフット(母趾球/ 小趾球/かかとの中心)をしっかり使うことを意識して研究しているのがGETA LABOの特徴でもあります。
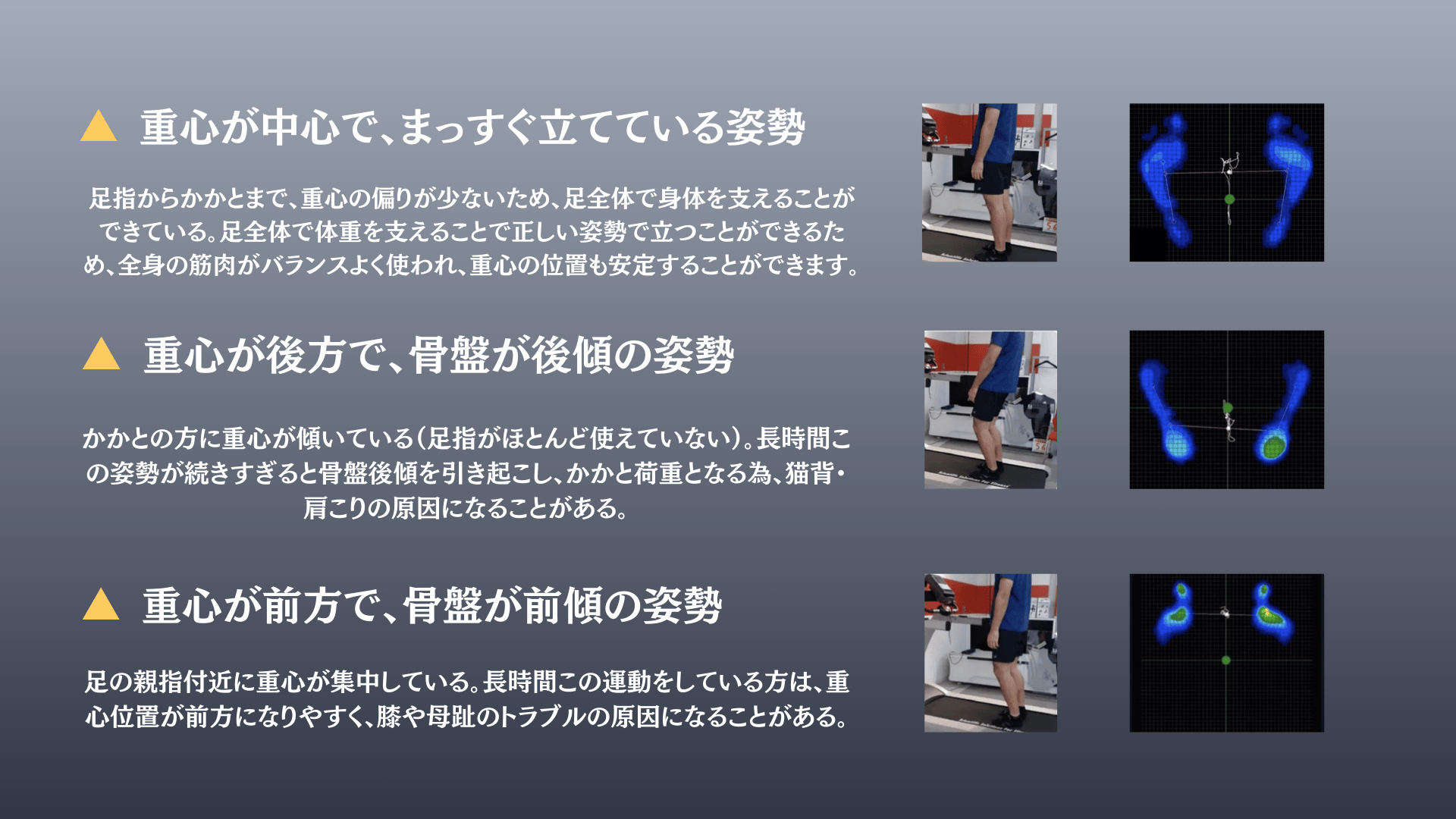
足圧と姿勢の関係
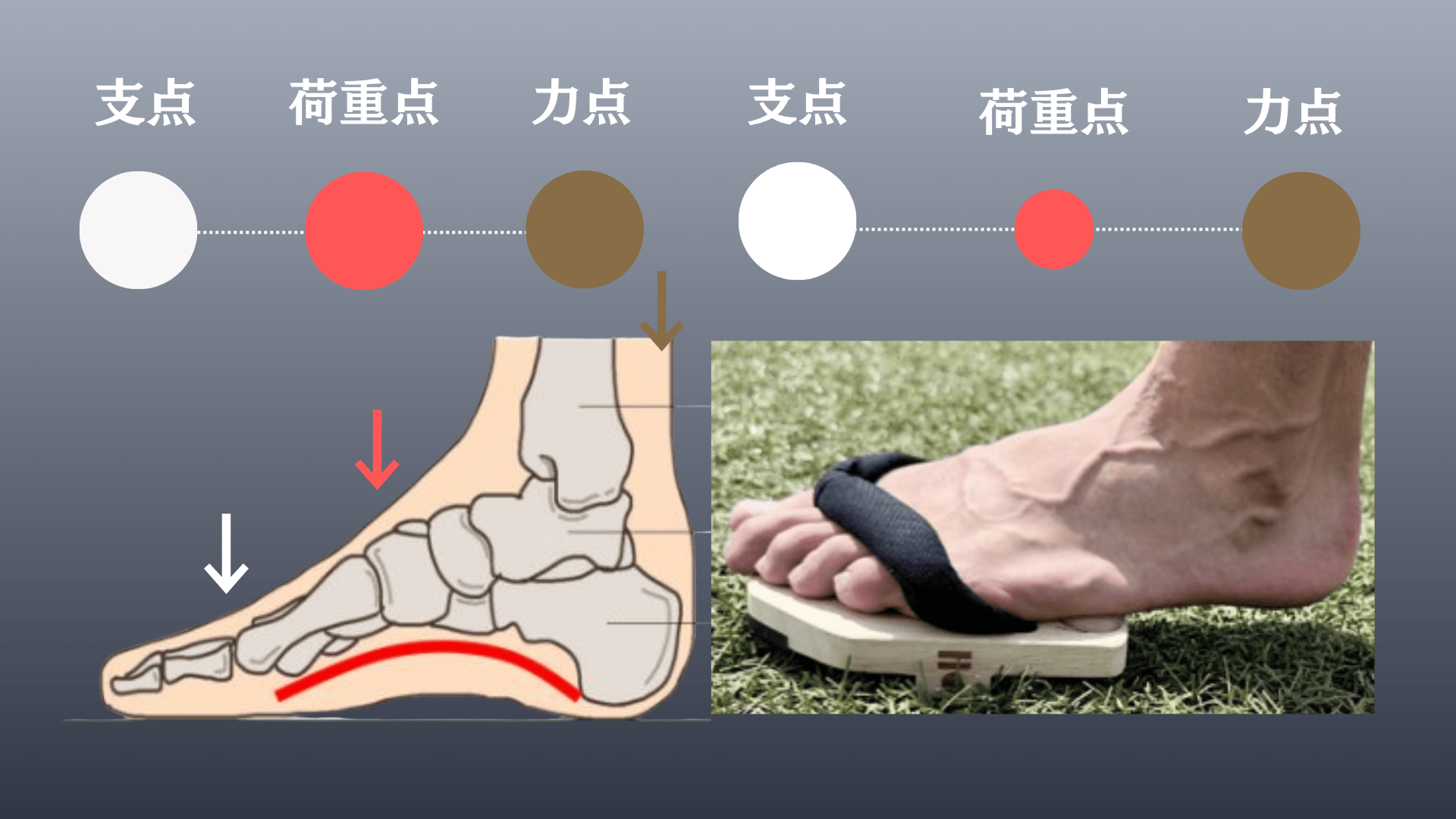
足の関節はテコの原理を使い、動いています
開発やトレーニング方法に活かすため、データの収集・解析を実施しています
一本歯下駄 fusionでの足踏みを計測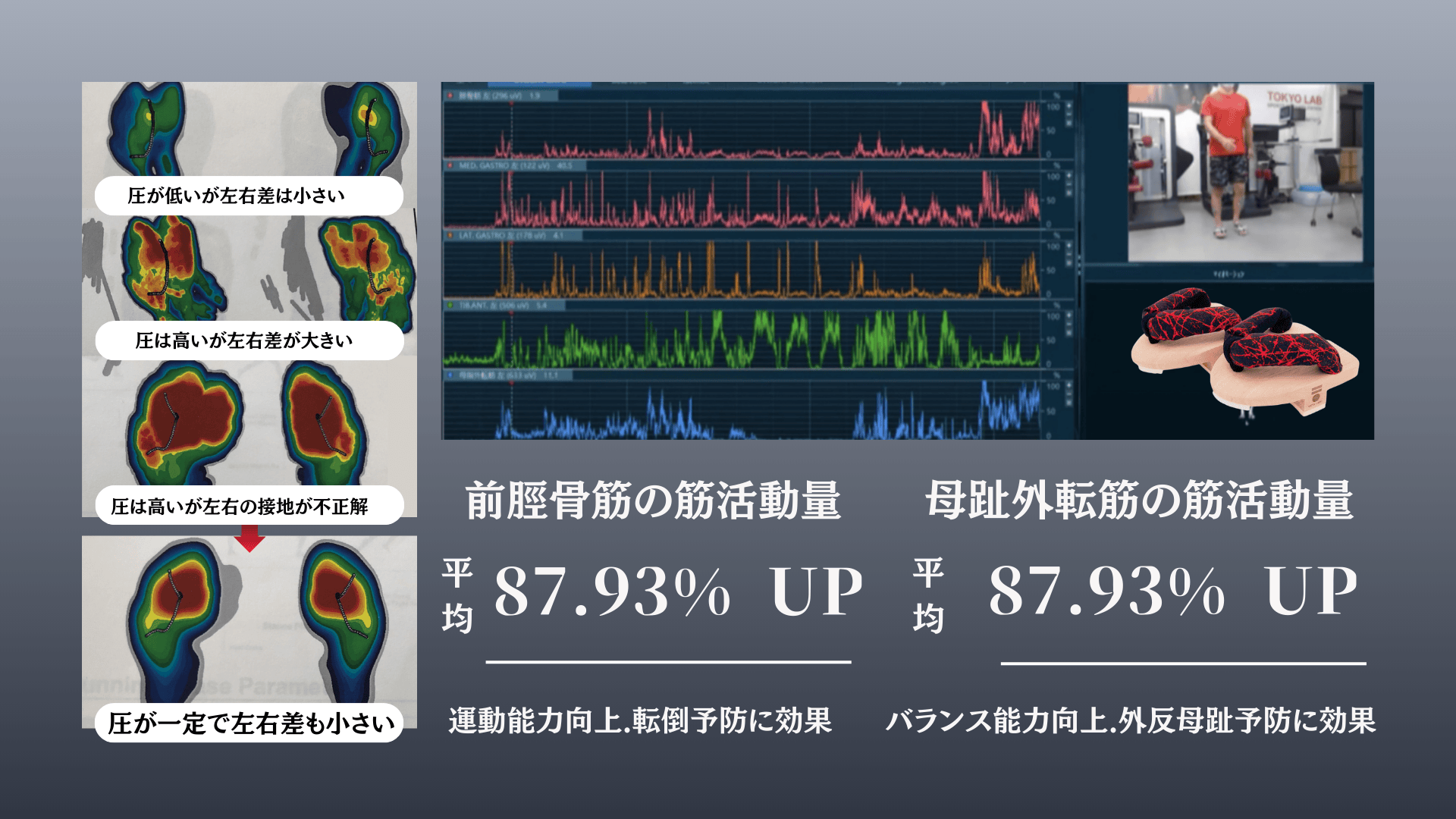
足の接地面は不安定になりやすいという原理があります。
靴では着地時に接地する面積が広いため、個々のクセが出やすく、正確に接地をくりかえすことが困難です。
怪我などの不安がない方は「圧が一定で左右差も小さい」という可能性が高い事が研究結果としてわかり、下駄によってバランスを整える事で良い生活習慣を過ごせるようになると期待しています。
下駄トレの3原理
Tripod(3点バランス)
principle of leverage(テコの原理)
ground reaction force vector GRFV(床反力ベクトル:足圧変化の部分のこと)
GETALABOのABC

「GETA LABOのABC」とされているキーワードが3つ存在します。
1.Assist アシスト「下駄は動きを助け、スムーズな歩行を可能に」
・運動力学に基づいて設計されたGETA LABOの下駄は効果的な歩行や走行を可能にします。
・かかとを持ち上げる動作と、下ろす動作を交互に行うための力点が明確になるため、かかとを下ろす動作が行いやすくなり、自然とかかとが持ち上がります。
・歯を全面的に使うことで軸を作り安定性(stability)を高める『Joint by joint theory』(ジョイントバイジョイント理論)
2.Balance バランス「多くの筋肉と神経に働きかける」
・下駄の歯が一本であることから、常にバランスを取ろうとすることで常に足から体幹まで筋肉が刺激されます。
・多くのエクササイズグッズは、その場から動くことができないが、一本歯下駄は自由に動き回ることができます。
様々な動作を行うことで、より実践的な神経の働きを促します。
・予測的姿勢制御向上→バランスをとり脳に働きかける『Tanticipatory postural adjustments』
3.Corrective 修正・矯正「目的別に使い分けることができる」
・下駄の歯と鼻緒のサイズが様々あることで、足の関節の固定力や力の入れ方に違いが出て、苦手な動きを練習することが可能になります。
・バランスボールのように常に動き続けているわけではなく、動作毎に答えが明確にあるため、継続的に練習を行うことによって自分自身の感覚を高めることができます。
・力の吸収と力の発揮が調整される『ロッカーファンクション機能』
GETA LABOの使い方
GETA LABOの一本歯下駄は「フラット・ステップ・ダウンヒル・アップヒル」という、 4つの基本形で使うことができます。
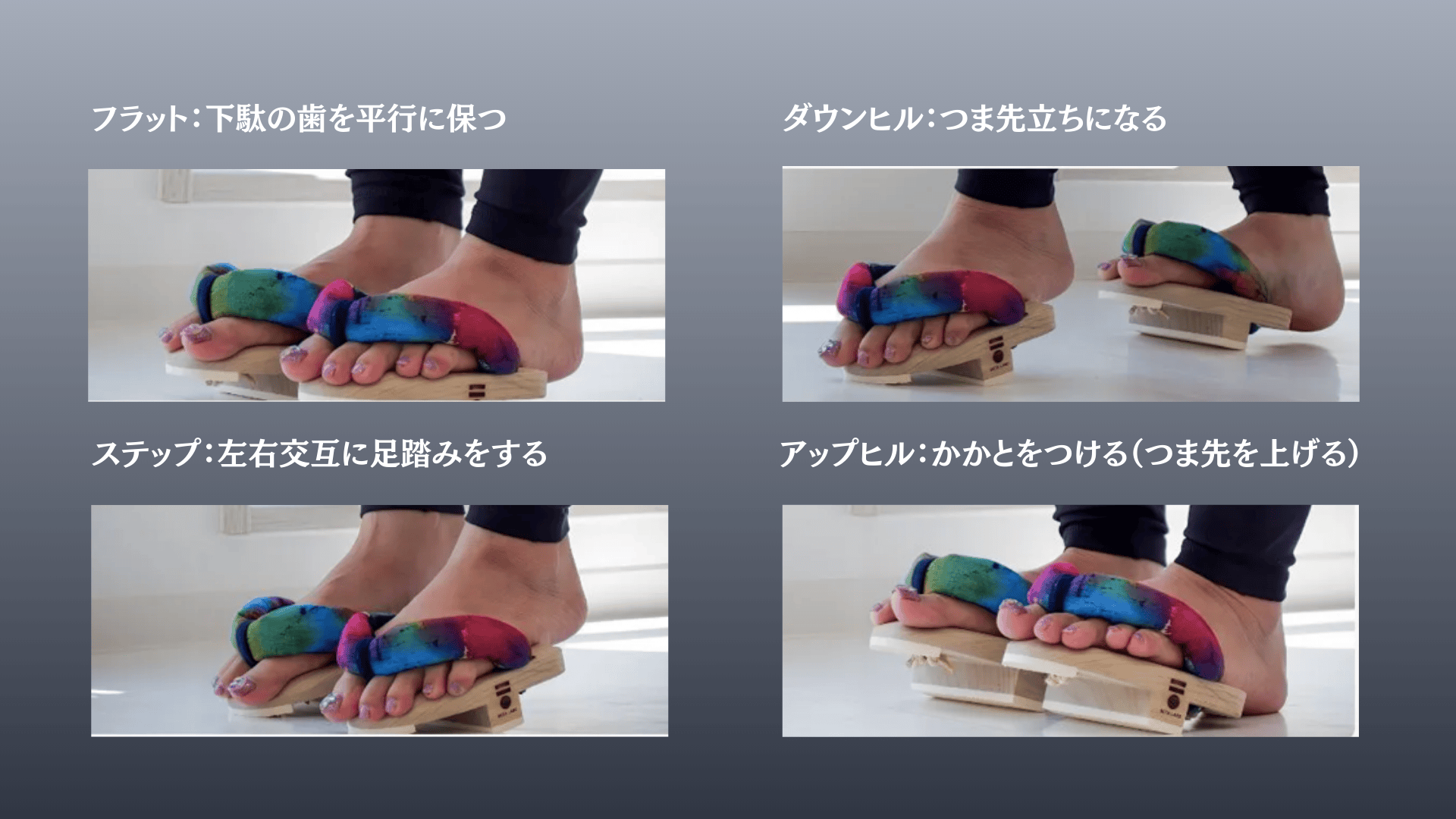
フラット:下駄の歯を平行に保つ
ステップ:左右交互に足踏みをする
ダウンヒル:つま先立ちになる
アップヒル:かかとをつける(つま先を上げる)
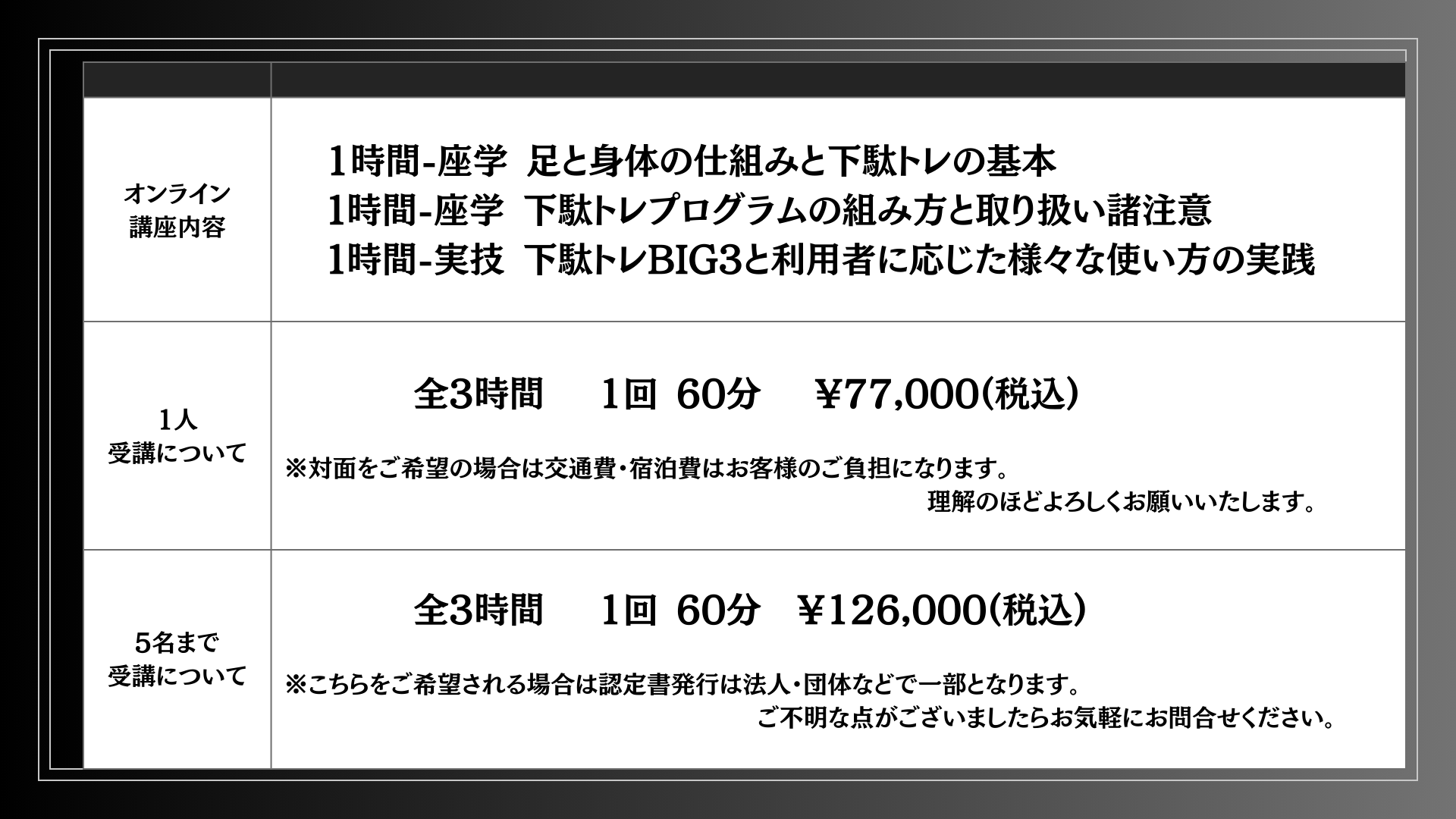
より深く学びたい方へ
インストラクター養成講座のご案内
下駄トレ®︎講座・受講講座
受講に必要なもの
【LABO ONE シリーズ】【LABO ONE α】【PREMIUM CARE】【fusion】
その他のお持ちの下駄の指導はレクリエーションの項目で使い方の案内をいたします。下駄を履いて運動するため、動きやすい服装でご準備お願いします。
推奨下駄
どなたでも体験しやすい足半一本歯下駄シリーズをお勧めしておりますが他の下駄でも問題ございません。
「日々トップアスリートと向き合って見えた理論を一般指導者へ」
目的
下駄トレ®(各種下駄)の原理・指導方法・注意点(リスクマネジメント)を学び、
安全に・効果的に・わかりやすく多くの方に伝える能力を身につけます。
お問合せ・ご相談はお気軽にご連絡ください。
対象者
健康増進や学校(部活等)、地域活動で利用したいと考えている一般の方
・どのように人へ指導したら良いか分からない方
・実践的に使いたいアスリートの方
・各種下駄の使い分けを学びたい方
参加資格
GETA LABO の下駄をお持ちの方
よくあるご質問
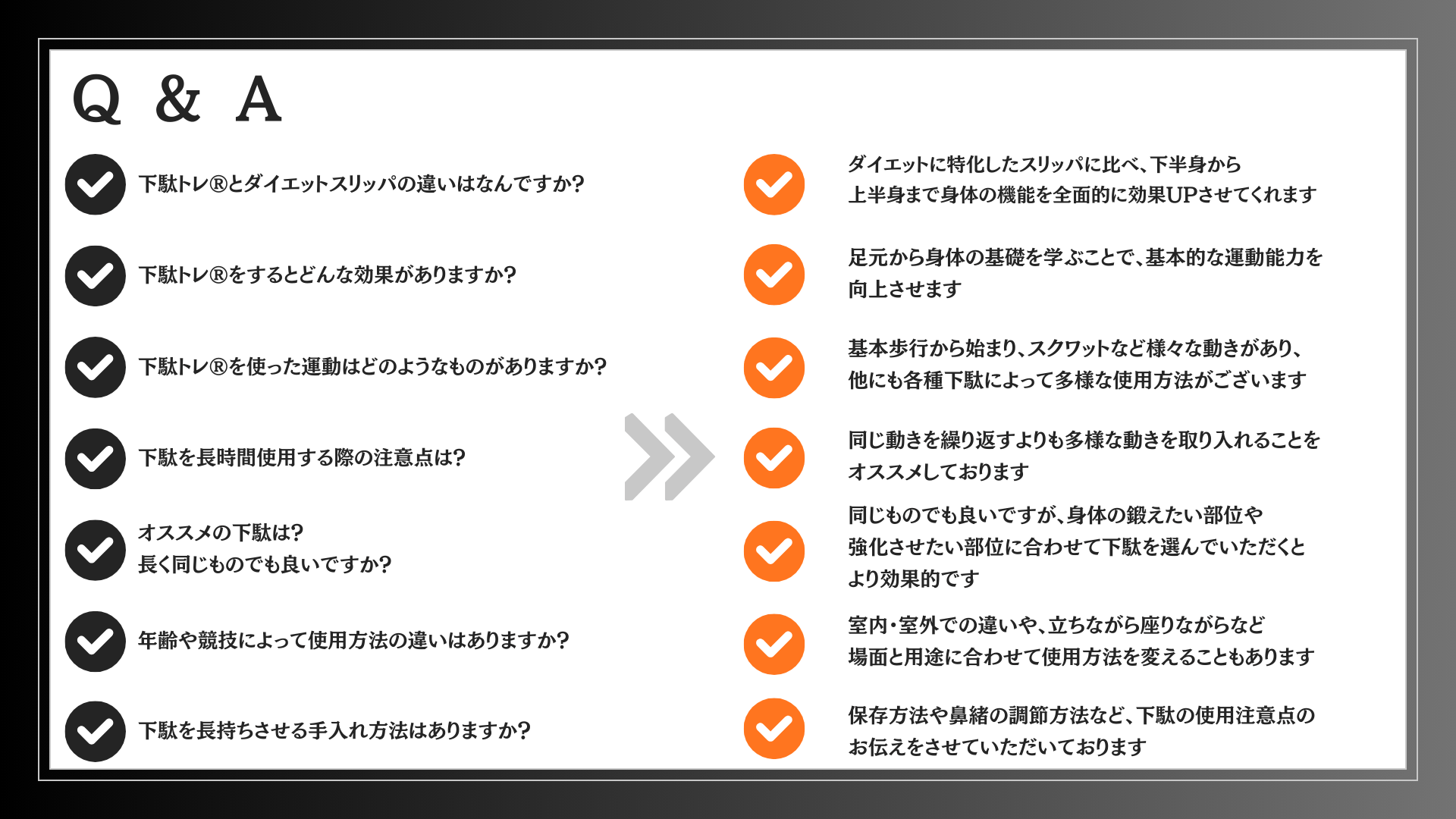
GETA LABOは日々様々な現場・機関で研究されており特許庁認定プロダクトも複数開発しております。
多様なプロダクトがあなたのパフォーマンス力をアップさせます。